Research Interests
“My research interests lie at the intersection of dynamics, control theory, and optimization, aiming to answer the following question: How can we enable robots to move and perform dynamic tasks in their environment efficiently, safely, and robustly? Specifically, I am interested in optimal, nonlinear control and learning-based techniques, focusing on informed formulations that capture essential dynamics and leverage system properties while remaining mathematically well-conditioned for tractability in real-world applications.”
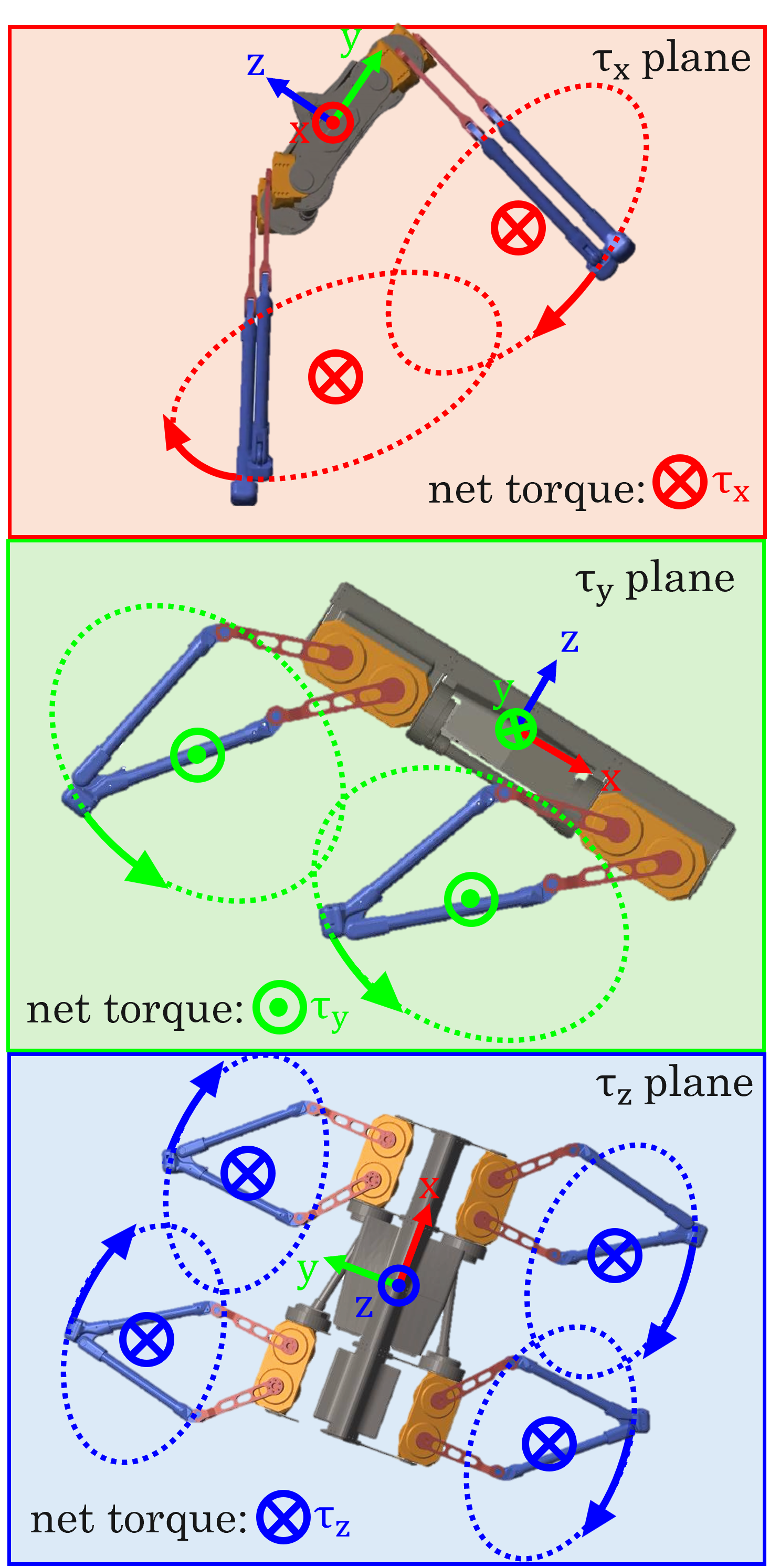
Modeling and In-flight Torso Attitude Stabilization of a Jumping Quadruped
M. Papadakis, J. A. Olsen, I. Poulakakis, and K. Alexis, “Modeling and In-flight Torso Attitude Stabilization of a Jumping Quadruped”, in International Symposium of Robotics Research , Long Beach, California, USA, 2024
Abstract: This paper addresses the modeling and attitude control of jumping quadrupeds in low-gravity environments. First, a convex decomposition procedure is presented to generate high-accuracy and low-cost collision geometries for quadrupeds performing agile maneuvers. A hierarchical control architecture is then investigated, separating torso orientation tracking from the generation of suitable, collision-free, corresponding leg motions. Nonlinear Model Predictive Controllers (NMPCs) are utilized in both layers of the controller. To compute the necessary leg motions, a torque allocation strategy is employed that leverages the symmetries of the system to avoid self-collisions and simplify the respective NMPC. To plan periodic trajectories online, a Finite State Machine (FSM)-based weight switching strategy is also used. The proposed controller is first evaluated in simulation, where 90 degree rotations in roll, pitch, and yaw are stabilized in 6.3, 2.4, and 5.5 seconds, respectively. The performance of the controller is further experimentally demonstrated by stabilizing constant and changing orientation references. Overall, this work provides a framework for the development of advanced model-based attitude controllers for jumping legged systems.
Tools: ROS1, Drake, Acados, Matlab, C++, Python, URDF

Robotic Welding
As a junior robotics engineer at iKnowHow, I worked on an robotic welding platform designed for low volume welds without manual programming or CAD file input. The system utilizes a 3D scanner, a seam tracker and a VR headset and interfaces with a common welding machine.
I improved the existing pipeline (e.g. cleaner mesh reconstruction using Open3D, added telemetry using DataTamer, sped up and increased the robustness of the toolchanging process, various enhancements and bugfixes for the seam tracker driver), integrated new components (ros2 modbus driver) and improved the welding pipeline by implementing a servoing controller using moveit servo. I also assisted in the development and integration of the VR UI and the deployment of a voice-based interface by creating a public REST server. Finally, to validate system performance and meet project related KPIs, I carried out several integration tests and experiments, and I showcased the platform at various events.
Tools: ROS2, MoveIt, ros2_control, C++, REST, Unity (for VR)
Publications
Conference Papers
M. Papadakis, J. A. Olsen, I. Poulakakis, and K. Alexis, "Modeling and In-flight Torso Attitude Stabilization of a Jumping Quadruped", in International Symposium of Robotics Research , Long Beach, California, USA, 2024 | Site | Video | Paper